- English
- Esperanto
- icelandic
- беларускі
- O'zbek
- Hawaiian
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- český
- ελληνικά
- український
- Javanese
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Lietuvos
- Eesti Keel
- Română
- Srpski језик
- فارسی
- தமிழ்
- తెలుగు

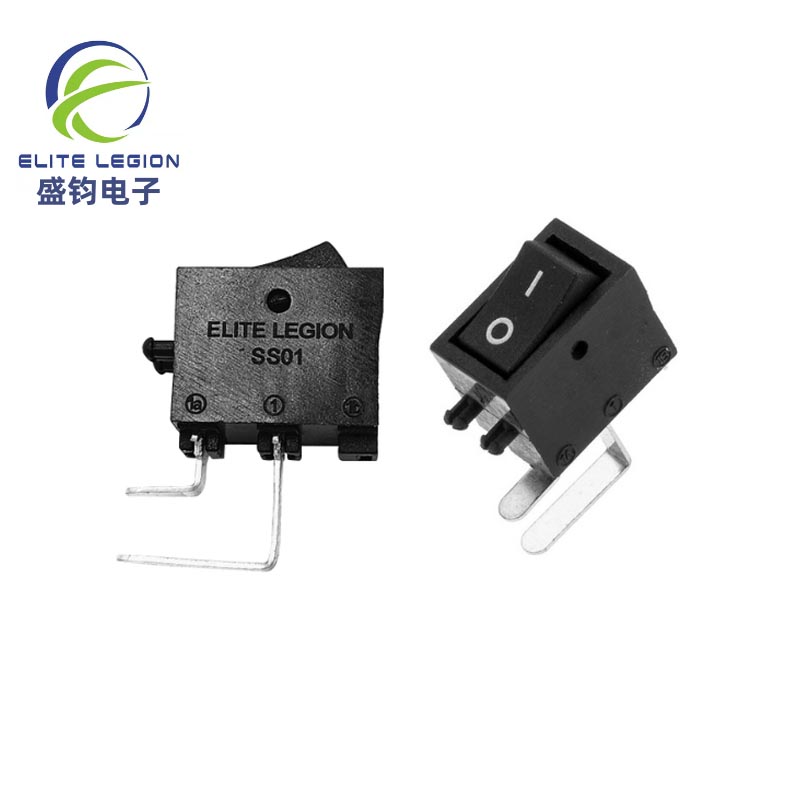
ما هي أنواع مفاتيح الروك المختلفة؟
يتم استخدام مفاتيح الروك عادة في الإلكترونيات للتحكم في/إيقاف تشغيل التيار العالي أو المنخفض. من خلال حركة بسيطة لأعلى ولأسفل ، تعمل رافعة على المفتاح كدقة مراقبة لتوصيل أو فتح الدائرة الكهربائية. يتم إرفاق آلية المفتاح عمومًا داخل إطار بلاستيكي أو معدني قد يتضمن مصدرًا للضوء للإشارة إلى متى يتم تشغيل المفتاح. إنه مفتاح مشهور للغاية ويمكن العثور عليه في أنواع مختلفة.
ما هي أنواع مفاتيح الروك المختلفة؟
1. spst (رمي واحد قطب واحد)
يتم استخدام محطة واحدة غير مرسمة لإكمال الدائرة. إنه النوع الأساسي منمفتاح الروكويستخدم لتشغيل أو إيقاف الطاقة على دائرة واحدة.
2. DPST (رمية واحدة مزدوجة القطب)
لديها اثنين من المحطات غير المرغوب فيها. عند تشغيله ، تتصل كلا المحطتين لتشكيل دائرة وتشغيل الجهاز. يحافظ على فصل كلا المحطتين عند إيقاف تشغيل الطاقة.
3. SPDT (رمي مزدوج قطب واحد)
إنه بسيط ولكنه متعدد الاستخدامات ويمكن استخدامه للتبديل بين دائرتين مختلفتين. لديها ثلاث محطات. المحطة الأولى هي للاتصال الشائع في حين أن المحطتين الأخريين هما للدوائر المختلفة أو فصلها.
4. DPDT (رمي مزدوج القطب المزدوج)
يحتوي على ستة موصلات يمكنها التحكم في دائرتين مختلفتين في وقت واحد. عند تشغيله ، تشارك المحطات 1 و 2 و 3 و 4 أو 5 و 6 لإكمال الدائرة.
ما هي التطبيقات المستخدمة لمفاتيح الروك؟
1. أنظمة السيارات
2. الضوابط الصناعية
3. المعدات الطبية
4. المنتجات الاستهلاكية
5. النظم البحرية
ما هي مزايا مفاتيح الروك؟
1. من السهل العمل
2. متينة وطويلة الأمد
3. تصميمات جذابة
4. مناسبة للتطبيقات المختلفة
5. متوفر على نطاق واسع في السوق
في الختام ، تعد مفاتيح الروك خيارًا شائعًا للتحكم في وإيقاف الإلكترونيات. أنها تأتي في أنواع مختلفة يمكن استخدامها لتطبيقات مختلفة. أنها توفر مزايا مثل التصميم المريح ، المتانة ، والتنوع. مع العديد من التطبيقات ، من المهم معرفة نوع مفتاح الروك المناسب لتطبيقك.
Dongguan Sheng Jun Electronic Co. ، Ltd. هي شركة تصنيع محترفة ومورد لمفاتيح الروك. نحن نقدم أنواعًا مختلفة من مفاتيح الروك وخيارات التخصيص وفقًا لمتطلبات العملاء. يمكنك زيارة موقعناhttps://www.legionswitch.comللحصول على مزيد من المعلومات حول منتجاتنا. لأي استفسارات أو أسئلة ، لا تتردد في الوصول إلينا فيlegion@dglegion.com.
10 أوراق بحثية علمية يجب أن تقرأها
1. M. Saeb ، Y. L. Huang ، M. Lin ، P. Chen ، B. Menelas ، et al. (2021) طريقة تحسين جودة الخدمة القائمة على الذكاء السرب لنظام إنترنت الأشياء ، أنظمة الكمبيوتر في المستقبل ، المجلد. 115 ، ص. 212-228.
2. L. Liu ، J. Lu ، Z. Gao ، Y. Zhang (2019) Pathertive Optimum Optimum of Internet of Things سلسلة التوريد في ظل بيئة غير مؤكدة ، Journal of Cleaner Production ، المجلد. 233 ، ص. 408-423.
3. M. Shilpa ، S. M. Shashidhara ، B. R. Prakash (2019) خوارزمية إطفاء معدلة مع معلمات تحسين مهمة المهمة في بيئة السحابة ، Cluster Computing ، المجلد. 22 ، رقم 3 ، ص 683-697.
4. 7 ، ص. 136145-136157.
5. X. He ، Y. H. Hu ، X. S. Zhang ، J. B. Song ، Z. G. Guo (2019) Planning Trailing Planning of Raching Coating Robots: A Contential Study ، IEEE Transactions on Control Systems Technology ، Vol. 27 ، رقم 3 ، ص 966-974.
6. C. Zhou ، B. Zhou ، M. Cao ، Y. Xu ، S. Cai (2020) تحسين تخطيط الإنتاج لإعادة التصنيع في ظل مطالب غير مؤكدة ، Journal of Cleaner Production ، المجلد. 242 ، ص. 118464-118474.
7. M. Cheng ، S. Fei ، S. Zhang ، N. Chen ، Y. Cui (2019) آلية تعويضات أمن المعلومات المستندة إلى blockchain في الإنترنت الصناعي للأشياء ، مجلة الإنتاج الأنظف ، المجلد. 221 ، ص. 559-570.
8. Y. Liu ، G. Liu ، Q. Xu ، L. Wu ، Y. Shi ، et al. (2019) بروتوكول توجيه يمكن الاعتماد عليه فعال الطاقة يعتمد على نظام مناعة اصطناعي لإنترنت الأشياء ، المستشعرات ، المجلد. 19 ، رقم 6 ، 1430.
9. J. Li ، B. Yu ، L. Qi ، Q. Zhang (2019) مراجعة المنزل الذكي القائم على blockchain: التطبيق ، التحديات والاتجاهات المستقبلية ، IEEE Access ، المجلد. 7 ، ص. 46909-46922.
10. H. Cheng ، F. Wu ، W. Feng ، S. Zhou ، E. K. Park (2020) مخطط التحكم في المركبات الخالية من الاصطدام يعتمد على تحليل الكتلة لمدينة ذكية ، معاملات IEEE على أنظمة النقل الذكية ، المجلد. ص ، رقم 99 ، ص 1-13.